Autonomous Underwater Vehicles
Autonomous Underwater Vehicles
Autonomous Underwater Vehicles or AUVs are unmanned vehicles that operate independently and under their own power. While very large-scale surface processes can be easily addressed by both remote sensing and ship-borne systems, characterisation of seafloor processes is often unachievable by these traditional methods. AUVs are effective for rapid and cost-effective high-resolution, accurately geo-referenced and targeted acoustic imagery of the seafloor.
This IMOS Facility finished in June 2023, however data is still available through the AODN Portal.

Why we use them
IMOS deployed AUVs in Australian waters to provide a critical link between oceanographic and benthic processes from both tropical and temperate reef environments, spanning the entire latitudinal range of Australia.
Data
To support a more in-depth understanding of natural, climate change and human-induced variability in the shelf environments, the Autonomous Underwater Vehicles Facility operated an integrated benthic monitoring program collecting high-quality seafloor imagery and associated water column data using AUVs at sites around the country.



Sub-Facilities


Useful information
Instrumentation and data
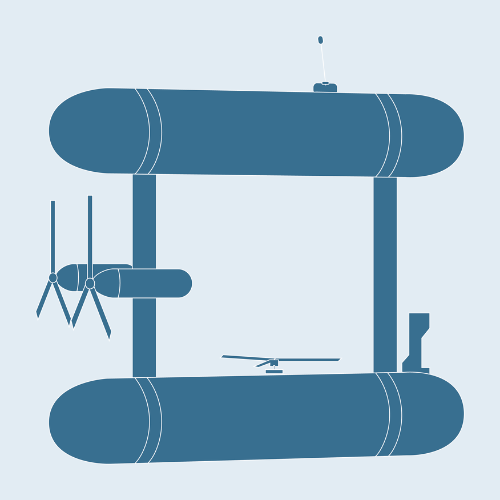
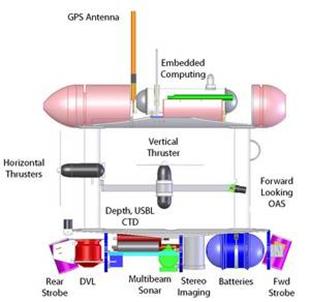
The Autonomous Underwater Vehicle facility currently owns and operates the ocean going AUV called ‘Sirius’. Managed by the University of Sydney’s Australian Centre for Field Robotics (ACFR) this vehicle is a modified version of a mid-size robotic vehicle called Seabed built at the Woods Hole Oceanographic Institution. Sirius is specifically designed for undertaking high resolution benthic optical and acoustic imaging work and is equipped with a full suite of oceanographic instruments. These include a high resolution stereo camera pair and strobes, a 330 kHz multibeam sonar, depth and conductivity/temperature sensors, a 1200 kHz Doppler Velocity Log (DVL) including a compass with integrated roll and pitch sensors, an ultra-short baseline acoustic tracking and communications system and a flurometer to measure coloured dissolved organic matter (CDOM), chlorophyll-a and backscatter. Data is time-stamped and logged on the vehicles on-board computer. Optical imagery collected by the AUV Sirius in Australian waters can be found through the AUV Image Viewer and the Australian Ocean Data Network (AODN) Portal.
Operating institution
Sydney Institute for Marine Science (SIMS)
Co-investors
University of Tasmania · University of Western Australia · University of New South Wales · CSIRO · South Australian Research and Development Institute (SARDI) · Australian Institute of Marine Science (AIMS) · Queensland Museum · NSW Department of Primary Industries · Parks Victoria · Deakin University









Acknowledging IMOS
Users of IMOS data are required to clearly acknowledge the source material by including the following statement:
Australia’s Integrated Marine Observing System (IMOS) is enabled by the National Collaborative Research Infrastructure Strategy (NCRIS). It is operated by a consortium of institutions as an unincorporated joint venture, with the University of Tasmania as Lead Agent.